以下に、Giulio Tononi "Consciousness as Integrated Information: a Provisional Manifesto" (Biol. Bull. December 2008 vol. 215 no. 3 216-242)の A Methematical Analysis: Quantifying Integrated Informationの部分 (pp.219-221) の私なりの翻訳を掲載します。
Giulio Tononi
Consciousness as Integrated Information:
a Provisional Manifesto
(Biol. Bull. December 2008 vol. 215 no. 3 216-242)
■ お断り
私は神経科学や情報理論については専門的知識をもっていませんので、思わぬ誤訳や誤読があるかもしれません。間違いを見つけられた方がいらっしゃいましたら、ご教示いただけたら幸いです。
カタカナ表記や英語表記そのもので使われている専門用語にもあえて日本語訳をつけてみました。たとえば "effective information"に対する「因果情報」や、"complex"に対する「複合体」などです。翻訳については、できるだけ日本語(漢語か大和言葉)にするべきという信念を私がもっているからです。しかし、こういった日本語化により、原語の正確な理解が阻害されるかもしれません。これに関しても専門家からのご意見などございましたらお聞かせいただけたら幸いです。
■ なぜこの翻訳を試みたのか
先日来、統合情報理論 (Integrated Information Theory)の概説を読み、意識はもとより意味についてもとても啓発されました。
クリストフ・コッホ著、土屋尚嗣、小畑史哉訳 (2014) 『意識をめぐる冒険』 岩波書店
マルチェッロ・マッスィミーニ、ジュリオ・トノーニ著、花本知子訳 (2015) 『意識はいつ生まれるのか』 亜紀書房
しかし、その理論の数学的基礎のところが今ひとつよくわからなかったので、この理論を提唱しているトノーニの原著論文の一つの部分的翻訳を通じて私なりに理解することを試みました(翻訳を終えてみて、自分ではずいぶん理解が進んだと思います。ただ、二つ目の数式のΠの箇所はまだよくわかっていません。また「ポート入出力」などのコンピュータ科学を知っている人には自明の概念もよくわかってはいません)。
数学的基礎といっても、もちろん概説レベルの説明で満足することも可能です。概説書の説明を私なりに言い直しますと、統合情報の量をΦ、システム全体 (whole) が生み出す情報量をW、システムの一つ一つの部分(part) が生み出す情報量の総和をPsと表記するなら、統合情報は次のように定義されます。
Φ = W - Ps
こういってしまえば非常に簡単ですが、この計算を実際に行おうとすると、8つの要素からなるシステムのΦを出すだけで、コンピューターで数時間かかるそうです(『意識はいつ生まれるのか』136ページ)
以下に翻訳した部分は、その計算の詳細までは書いていませんが、統合情報理論による意識の数学的説明の原理的な部分をうまく説明しているものだと思います(この論文には、さらに意識を幾何学的に説明する部分もありますが、今回はその部分は翻訳していません)。
■ 翻訳を読む前に確認しておきたいこと
以下の翻訳を読む前にできれば確認しておきたい点が二つあります。
(1) 統合情報理論に関する基礎的な理解
これについては以下の二つの拙稿をご参照いただけたら幸いです。
統合情報理論を直観的に理解するための思考実験
http://yanaseyosuke.blogspot.jp/2015/10/blog-post_7.html
クリストフ・コッホ著、土屋尚嗣・小畑史哉訳 (2014) 『意識をめぐる冒険』 岩波書店
http://yanaseyosuke.blogspot.jp/2015/10/2014.html
(2) フォトダイオード思考実験の前提
私がこの論文を読んで、わかったようでわからなかったのは、以下のことをTononiが明示的に書いていなかったからです。翻訳をしながら、この論文をそれなりに熟読することができたので、ようやく彼が省略していた以下の前提がわかりました。読者の皆様も、この点を予めご理解いただけたら論文(の翻訳)も少しは読みやすくなるのではないかと思います。

解説図センサー (S) がオンになれば検知器 (D) はオンになるし、SがオフになればDもオフになる。ただ、検知器が作動するには時間がかかり、tnの時点でのSの状態 (Sn) を反映するのは、tn+1の時点のDn+1である。もし現時点 (t1) でのシステムの状態が、センサー (S1) も検知器 (D1) もオンになっている状態 (11)だとしたら、過去の時点 (t0) でのシステムの状態は (10) か (11) でしかありえず、未来の時点(t1) でのシステムの状態は、(01) か (11) でしかありえない。
それでは以下、拙訳を掲示します。図は上記サイトでOpen Accessとなっている論文からコピーして転載しました。図の説明も翻訳し、図の下にインデントして掲載しています。脚注の翻訳は最後に提示しています。
*****
数学的分析:統合情報を数量化する
これまで述べてきた現象学的分析が示していることは、意識が生じるためには、ある物理的システムが大量のレパートリーの中から異なる状態を区別する
(情報) と同時に、そのシステムが統合されていなければならないことだ。つまり、意識を生み出すシステムは、因果的に独立した別々の部分に分解できない一つのシステムとして機能しなければならない
(統合)。しかし、統合情報を測定するにはどうしたらいいのだろうか。以下では、システム全体が、個々の部分によって独立に生成された情報よりもはるかに多い情報を生成したら、それを数量化するということを中心的な考えとして説明を進める (Tononi, 2001, 2004; Balduzzi and Tononi, 2008)。
情報
最初になすべきことは、意識を生み出すシステムがどれだけ多くの情報を生み出すかの査定である。図1にある、二つの値だけを取るユニットから構成されるシステムを考えていただきたい。このシステムは、センサーSと検知器Dから構成されるフォトダイオードをきわめて単純化したものと考えることができる。システムは、状態 (図1では11となっている。最初の数字がセンサーの状態、2番目の数字が検知器の状態を表している)とメカニズムによって特徴づけられる。センサーと検知器の間のつながり(矢印)が因果的相互作用を表している。検知器は、センサーの状態をチェックし、センサーがオンならオンになり、そうでなかったらオフになる(一般的には、入力-出力表によって一つ一つの因果的相互作用を記述することができる)。

図1因果情報(A) センサーと検知器のユニットから構成される「フォトダイオード」。フォトダイオードのメカニズムは、センサーの電流が閾値を超えれば検知器ユニットがオンになるもの。この図では、両方のユニットがオンになっている (二値の1で、灰色で示してある)。(B) システム全体(センサーユニットと検知器ユニット)には可能な状態が四つある (00, 01, 10, 11)。 可能な確率分布 (p (X0 (maxH)) = (1/4, 1/4, 1/4, 1/4)) は、四つの状態に関する最大エントロピー分布である。フォトダイオードのメカニズムから考えると、検知器がオンになっていれば、センサーもオンになっていなければならない。したがって、フォトダイオードのメカニズムと現在の状態によって次の分布が特定される。四つの可能な状態のうち二つ (00, 01) は排除される。残りの二つの状態 (10, 11) の確率は等しい。なぜならば、その二つの状態をメカニズムは区別することができないからである (検知器の以前の状態は、現在のセンサーの状態に違いをもたらさない)。現実の分布はゆえに p (X0 (mech, x1)) = (0, 0, 1/2, 1/2) となる。二つの確率分布pとqの間の相対エントロピー (カルバック・ライブラー情報量)は H [p|q] = pi log2 pi/qiであるから、x1 =11という出力と関連づけられる因果情報 ei (X (mech, x1)) は1ビットである(因果情報とは可能な分布に対する現実の分布のエントロピーである)。
可能性としては、二値を取る要素が二つ集まってできたシステムは、(00, 01, 10,
11) の四つの可能な状態のどれかである。それらの確率は等しいものとする (p = (1/4, 1/4, 1/4, 1/4)。形式的に表現するなら、この可能な(ア・プリオリな)レパートリーは、エントロピーの最大値をとる。つまり、ある時間
t=0 において可能なシステムの状態の確率分布が均一であり、これは完全な不確実性を表現している (p(X0(maxH)))。これらの可能な状態を、可能な入力の状態の集合と考えるなら、このシステムの特定のメカニズム X (mech) を、それより後のレパートリーを特定するもの、つまり可能な入力状態で刺激された時に生み出される出力の確率分布を特定するメカニズムとして考えることができる。現実には、システムはある一つの出力状態をとる
(図1では、t = 1, x1 =11)。11という状態で実現しているシステムは、それ以前のシステム状態 X0 が11か10のどちらかであり、00か01ではなかったに違いないという特定をしており、これは p = (0, 0, 1/2, 1/2) の状態に相当する (このシステムでは検知器の状態を特定するメカニズムはなく、検知器の状態は不確実なままである)。そうなると、形式的には、このシステムが11の状態であることにより、このt
= 1のX1の状態の原因となった(あるいはその状態へと導いた)かもしれない t = 0 時のシステムの現実の (ア・ポステリオリの) 確率分布もしくはレパートリーが特定され、t = 0 時でありえたはずがないシステムの状態を排除した (確率をゼロにした)ことになる。このようにして、不確実性や無知の縮減という古典的な意味での情報(システムのそれより前の状態に関する情報)が、あるシステムのメカニズムと状態によって構成される。もう少し正確に言えば、以前のシステムの状態は、11か10であり(しかしそのどちらかはわからない)、00か01ではない(しかしそのどちらかはわからない)という点で、システムのメカニズムと状態が1ビットの情報を生成したことになる。
一般に、ある一定のメカニズムがある一定の状態にあるという特徴をもつシステムによって生成される情報は、実際のレパートリーと可能なレパートリーの間の相対エントロピー H によって測定され、因果情報 (effective information) (ei) によって表される (「相対」は‖の記号で示される)。
ei ( X
(mech, x1) = H [p
(
X0 (mech, x1)) ‖ p (X0 ( maxH))]
相対エントロピーは、カルバック・ライブラー情報量としても知られているが、これは確率分布の差である (Cover and Thomas, 2006)。もし確率分布が同じなら相対エントロピーはゼロである。差が大きければ大きいほど、相対エントロピーは高くなる。2 比喩的に言うなら、システムのメカニズムと状態は、均一な確率分布を均一でない確率分布にすることで情報を生成する。この差が不確実性の縮減となる。当然、もしシステムの可能レパートリーが大きく現実レパートリーが小さければ、システムによって生成される因果情報の量は大きくなる。多くの初期状態が排除されるからである。反対に、もしシステムのレパートリーが小さい、もしくはもし現在の状態に導きうる状態がたくさんあるなら、生成される情報は小さい。排除される状態が少ないからである。たとえば、もしノイズばかりであったら(どんな状態からでも現在の状態へとなりうる)、他の可能性を排除することができず、情報はまったく生成されない。
メカニズムと状態が特定されれば因果情報は内部で特定されるわけであるから、因果情報はシステムの「内的」特性であると考えられる。因果情報を外部から外的視点で計算しようとするなら、システムをあらゆる可能なやり方で刺激して(つまり、最大エントロピー分布もしくは可能なレパートリーのすべてに相当する可能な入力状態のすべてを試し)、このシステムのメカニズムではどのような出力のレパートリーがその後に得られるかを知る。それから、システムの状態が与えられた時に現実のレパートリーがどうなるかをベイズ規則を用いて計算する (Balduzzi and Tononi, 2008).3
統合
二番目に、システムによって生成された情報のうちどれほどが統合情報であるかを見極めなければならない。つまり、どれほどの情報が、独立した部分の集まりからではなく、単一体の存在物から生成されたのか、ということだ。ここでの考えは、まずシステムの部分を独立したものだと考え、それらがどれだけの情報を生成するかを調べ、その情報量と、システムが全体としてどれだけの情報を生成するかを比較するというものである。
これも相対エントロピーの考えに基づき、システム全体が生成した確率分布 (p (X0
(mech, x1))と、部分kMの現実のレパートリーが生み出す、独立していると考えられたすべての部分が生成する確率分布でもって生じるシステムXの現実のレパートリーとの差を測定する。統合情報はΦの記号で示す(Φの縦線
“I”は情報 (information)
のiを示し、 “O”の円は統合を表す)。
Φ (X
(mech, x1))
= H [ p
(X0 (mech, x1)) ‖
Π p ( kM0
(mech, μ1)) ] for kM0
∈
MIP
つまり、一つ一つの部分の現実のレパートリーは、それ自体で一つのシステムと考えられるそれぞれの部分内部での因果的相互作用によって特定される。他方、外部からの入力は外的なノイズ源として扱われる。差を測定するのは、それぞれの部分で説明されない情報が最小になる分解法によってシステムを分解した上のことである。この最小情報分割 (minimum information
partition) (MIP) はシステムを最小部分に分解する。
この測定をどのように行うかを知るために、デジタルカメラの100万個のフォトダイオードの集合体が二つあると考えてみよう (図2の左側)。これまで見てきたように、一つ一つのフォトダイオードは、入力次第でオンかオフになるから1ビットの情報を生成する。互いに独立している二つのフォトダイオードは二つで2ビットの情報を生成するので、100万個のフォトダイオードは100万ビットの情報を生成する。しかし図に示されているように、独立した部分が生成する現実の確率分布と、システムが生成する現実の確率分布とは同一である。したがって、二つの確率分布の間の相対エントロピーはゼロである。このシステムは、部分によって生み出される以上の統合情報を生み出さない (Φ (X (mech, x1)) = 0 )。
明らかに、統合情報を高くするためには、因果的相互作用を部分の内部ではなく部分の間で起こすことによって情報を生成するようにシステムを構築しなければならない。したがって、システムが統合情報を生成できるのは、システムが情報の上で独立した部分に分解できない限りのことである。その簡単な例が図2 (右側)に示されている。この場合、システムの最小部分の間での相互作用が、部分自体による生成と説明される情報以上の情報を生成している (Φ (X (mech, x1) > 0)。
まとめると、統合情報とは、因果的相互作用全体が、部分が生成する情報以上に生成する情報である。4
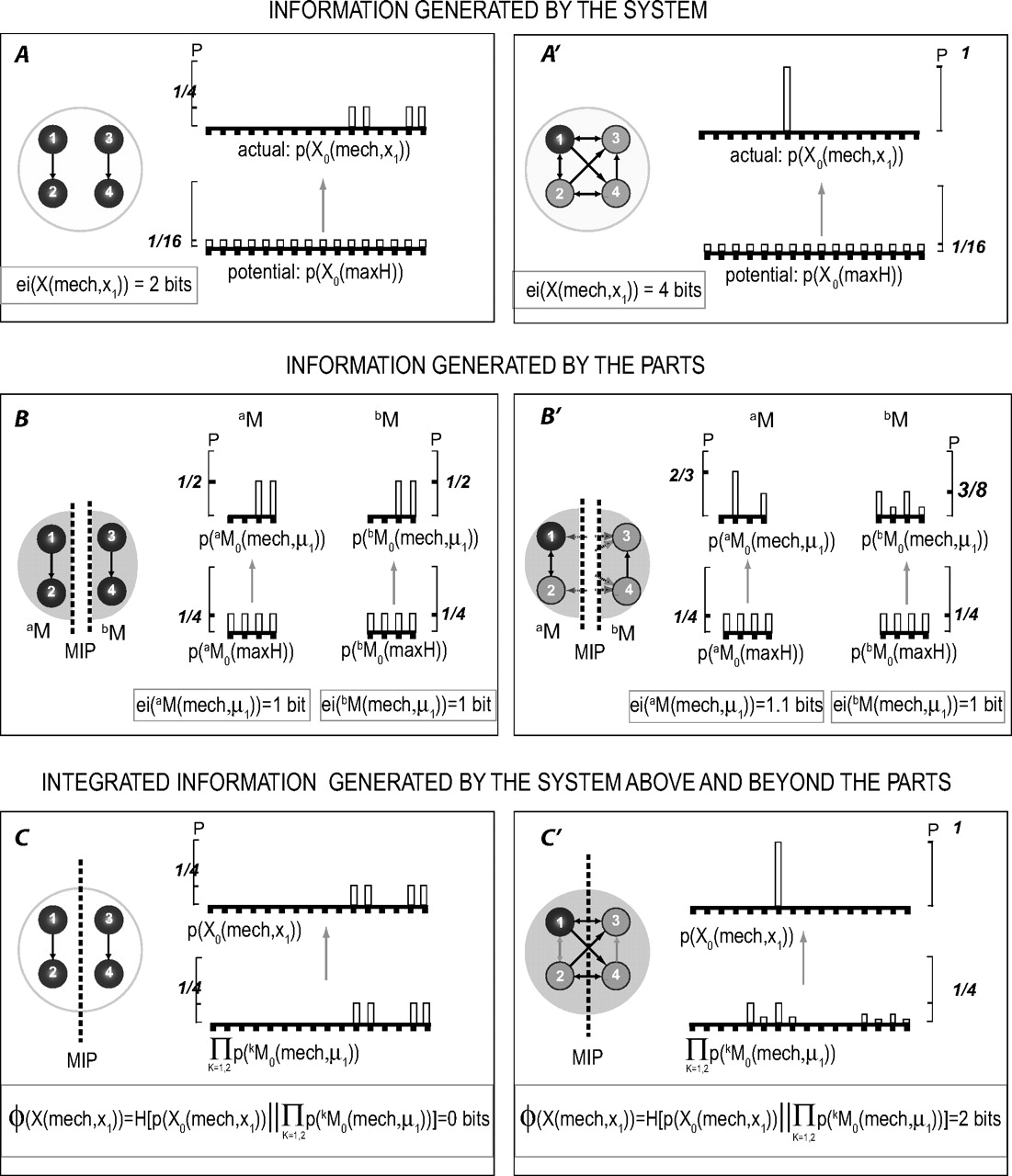
図2統合情報左側: デジタルカメラの中にある二つのフォトダイオード。(A) システム全体から生成される情報。システムは、n1とn3はオンであったに違いないと特定できるからシステム全体は2ビットの統合情報を生成する。(B) 部分によって生成される情報。最小情報分割 (MIP) は、システムを(最小の)部分に分解し、部分では説明できない情報を最小にするようにすることである。ここでは二つのフォトダイオードが部分になっている。(C) システム全体で生成される情報のすべてが、部分で生成される情報で説明される。この場合、全体の現実レパートリーが、部分の現実レパートリー(それぞれの確率分布が生み出すもの)を組み合わせたものと等しい。このシステムは部分以上の情報を生成しないので、このシステムは単一体の存在物と考えることはできない。右側:統合システムシステムの要素は、二つかそれ以上のスパイクを受けたらオンになる。現在、システムはX1 =1000の状態にある。(A’) このシステムはX1の状態を引き起こす唯一の状態を特定できるため、システムは4ビットの統合情報を生成している。他の初期状態は、現在とは異なる出力を引き起こすため排除される。(B’) それぞれにシステムとして考えられた二つの最小部分によって生成される統合情報。外の情報は外的ノイズとして扱われる。(C’) 統合情報は、部分から生成される情報(灰色の矢印)以上に、全体から生成される情報(黒色の矢印)である。この場合、全体の現実レパートリーは、部分の現実レパートリーを組み合わせたものとは異なり、相対エントロピーは2ビットである。このシステムは部分以上に情報を生成するので、一つの存在物(複合体)として考えられる。
複合体
最後に、システムの中の要素のすべての部分集合のΦ値を測定することにより、どの部分集合が複合体を形成しているかを決定することができる。具体的に言うなら、複合体Xとは、統合情報を生成 (Φ > 0) し、かつ、より高いΦ値をもつ、より大きな集合に完全に含まれてはいない要素の集合である。複合体は、したがって、自分自身の内的な「視点」をもっている単一体の存在物を形成していると考えられる (これと対立する概念は、外部の外的な視点から扱われる単一体の存在物である)。統合情報は複合体の内部で生成されシステムの外で生成されるのではないから、経験は必然的に内閉的であり、唯一の視点もしくはパースペクティブと関わるものである (Tononi and Edelman,
1998; Tononi, 2004). 脳といったある種の物理システムは、多くの低いΦ値をもつ小さな複合体とおそらく少数の大きな複合体といったように複数の複合体をもつだろう (Tononi and Edelman,
1998; Tononi, 2004)。 しかし実際は、任意の時点で一つの大きな経験をしている時には、主要複合体が一つだけあるのだろう(主要複合体の部分集合は低いΦ値しかもたない)。図3に示されているように、主要複合体が、より低いΦ値をもつ、より大きな複合体の中に組み込まれることもありうる。したがって、複合体はポート入出力を通じて、自分自身の部分ではない要素と因果的に結合しうる。統合情報理論にしたがえば、そのような要素は、主要複合体が生み出す意識経験に直接的な貢献をすることなく、主要複合体の状態に間接的な影響を与えていることになる (Tononi and Sporns,
2003)。

図3複合体このシステムにおいて、要素は、求心的な結合において奇数のスパイクを受けると発火する (矢印のないリンクは両方向の結合である)。統合情報の観点から分析すると、このシステムは一つの複合体 (x 灰色部分)からできているが、その中には三つの小さな複合体が含まれている (s, a, bで、それぞれ異なる灰色で示されている)。次のことを理解されたい。(i) 複数の複合体は重なりあうことがある。(ii) ある複合体が自分自身の部分ではない要素と因果的な相互作用を行うことがある。(iii) 同じ構造をもった要素の集まり (aとb)が、ポート入出力により異なる量の統合情報を生み出す。
脚注
2
同じ状態に対する二つの異なる分布が与えられれば、仮にそれらが同じエントロピーを有していたとしても、相対エントロピーはゼロ以上になる。
3
情報の古典的な定義
(Bateson, 1972) である「情報とは差異を生み出す差異である」を言い換えるなら、「状態とメカニズムによって区別される現実のレパートリー」となる。
4
言い換えるなら、「統合情報とは、システムが単一体の存在物となりうるほどにシステムに差異を生み出した差異である」となる。
*****
以上です。私の誤解・誤読・誤訳を怖れます。もし間違いがあれば、ご教示いただけたら幸いです。
関連記事
統合情報理論からの意味論構築の試み ―ことばと言語教育に関する基礎的考察― (学会発表スライド)
http://yanaseyosuke.blogspot.jp/2016/03/blog-post_8.html
統合情報理論 (Tononi and Koch 2015) の公理、および公理と公準をまとめた図の翻訳
http://yanaseyosuke.blogspot.jp/2015/12/tononi-and-koch-2015.html
統合情報理論 (Tononi 2008) の哲学的含意の部分の翻訳
http://yanaseyosuke.blogspot.jp/2015/11/tononi-2008_16.html
統合情報理論 (Tononi 2008) において、意味について言及されている箇所の翻訳
http://yanaseyosuke.blogspot.jp/2015/11/tononi-2008.html
統合情報理論: Tononi (2008) の論文要約とTononi and Koch (2015) の用語集 (表1) の翻訳
http://yanaseyosuke.blogspot.jp/2015/10/tononi-2008-tononi-and-koch-2015-1.html
Tononi (2008) "Consciousness as Integrated Information: a Provisional Manifesto" の「数学的分析」の部分の翻訳
http://yanaseyosuke.blogspot.jp/2015/10/tononi-2008-consciousness-as-integrated.html
統合情報理論を直観的に理解するための思考実験
http://yanaseyosuke.blogspot.jp/2015/10/blog-post_7.html
クリストフ・コッホ著、土屋尚嗣・小畑史哉訳 (2014) 『意識をめぐる冒険』 岩波書店
http://yanaseyosuke.blogspot.jp/2015/10/2014.html




0 件のコメント:
コメントを投稿